Student employee wanted for the project Realization of a multi-sensor system for robot-based incremental sheet forming
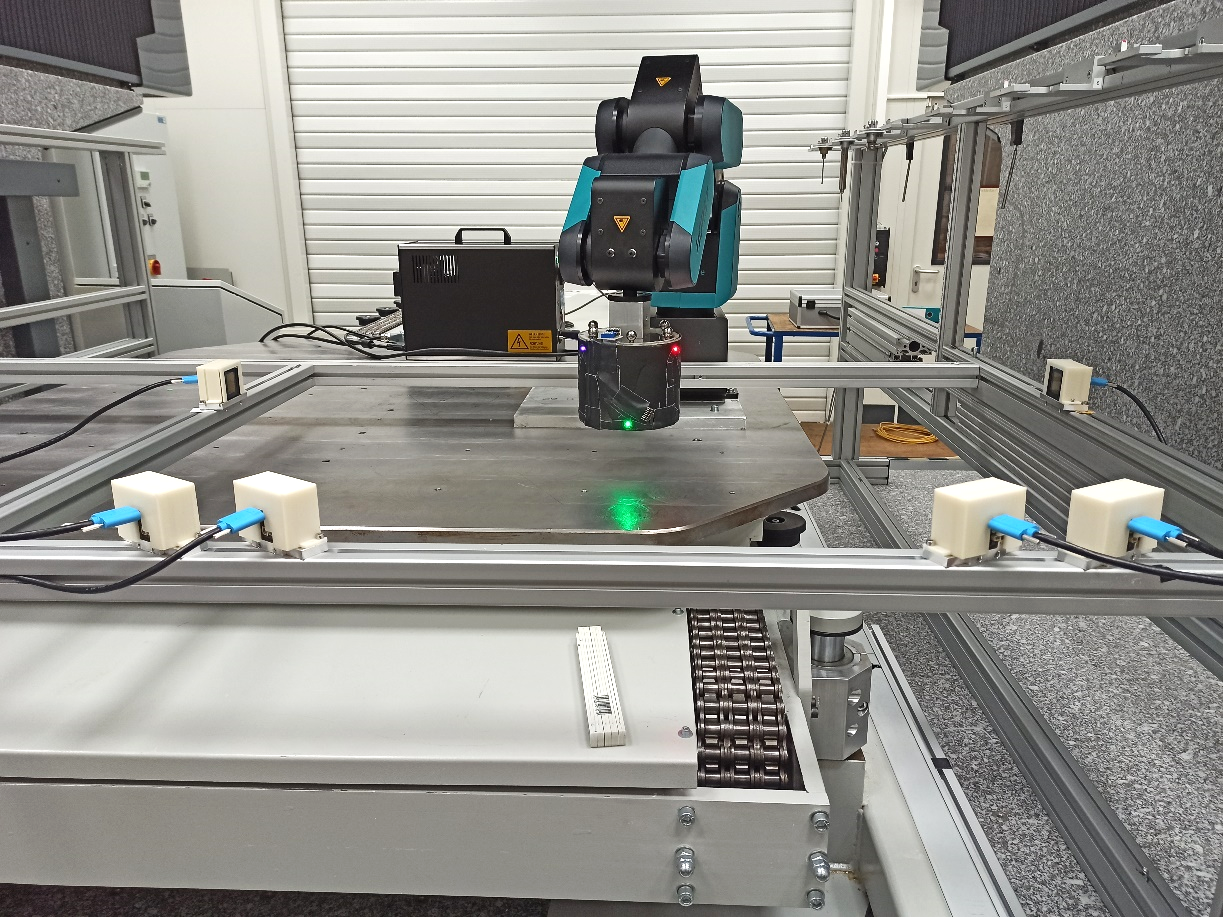
Robotic incremental sheet forming is an economical and flexible manufacturing process for the production of sheet metal parts in small quantities. In this process, a forming die forms the sheet metal over a counter die, whereby the positioning deviation and deformation of the robot lead to geometric deviations of the sheet metal. The aim of the project "µRoboForm" is to measure the deviations of the tool position in real time and to actively correct them. An optical multi-sensor system will be developed to detect the tool position, installed and applied on a robot. Based on this, the measuring system will be optimized for the application in robot-based incremental sheet metal forming.
Your tasks:
- Support in the conceptual design of the multi-sensor system in a robot cell and realization of the experimental setup
- Assistance in the development of a calibration strategy applicable in the robot cell
- Conduction of measurements with the robot
Your profile:
- autonomous and structured way of working
- experiences with MatLab / Python / C++ and Inventor or similar are advantageous
General conditions:
- flexible working times
- volume: 32 to 74 houres per month
- vacation entitlement
Contact Details
Marina TerlauE-Mail: Enable JavaScript to view protected content.Phone:+49 (0)421 218 646 32
